JKUATでロボコンを開催するに至るまで
あらまし
時は2019年にさかのぼる。ケニア教育省が職業訓練校(TVET)を対象に主催したRobokenというロボコンを見学した。このロボコンは過去数年にわたって開催されており、当初はJICAも関わっていたらしい。
この教育省のロボコンには長崎大学の先生方が審査員として関わっており、会場となるコンベンションセンター(KICC)のホールに設置された審査員席に座って審査を担当されていた。開発したロボットは日本の高専ロボコンなどと比べると規模も小さく機能もシンプルだが、各学校がチームで取り組んでいることや教育省によって組織的に運営されていることは素晴らしく、JKUATでも同様の試みができないかと考えるきっかけになった。
JKUATにはロボット分野に興味を持つ学生が多くおり、卒業課題で農業ロボット(種まきロボット、湖の除草ロボット、ドローンなど)に取り組む学生も多い。ロボットの研究に興味を持っている教員もいるが、ロボティクス自体を研究対象とする方は少ないと感じていた。
じつは自分がケニアに来ることが決まった際には、取り組みたい課題の一つとして、AIを活用した農業ロボットを考えていた。その後ケニアに来て、研究指導を担当していたPAUSTIの学生がまさにそのような農業ロボットの研究に取り組んだことや(深層学習により撮影画像から病害診断を行うロボット)、大学院におけるロボティクスの大学院講義を担当した経験から、ロボットに関する研究グループをJKUATの中に立ち上げようと決意した。2021年の4月に各所に話を持っていき、興味を持ちそうな同僚の教員に声をかけてみたところ、メカトロニクス、コンピュータサイエンス、電気などの教員たちが興味を示し、ともに活動を始めることにした。このグループではロボコンの開催と、ロボコンに必要な知識や技術を学生に教育することを主な活動とすることにした。実際にこの案が固まったのは2022年の1月である。
このプログラムはRobotics Dojoと名付けられ、まずはじめに参加者となる学生を募集した。25名を想定して募集をかけたところ、43名の学生が集まった。プログラムは2部に分かれており、第一部は技術研修で、5月から3ヶ月かけてロボコンに必要な技術を学ぶ。第2部は実際のロボコンに向けたロボット開発である。ロボコンは10月の開催を目指して、在ケニア日本国大使や教育省の高官なども招いて大々的に実施しようというのが当初の計画であった。
Robotics Dojo開始
学生たちを集めてキックオフミーティングを開いたのは2022年の5月末だが、Robotics Dojoの運営は当初想定していたようには進まなかった。最大の障壁はロボコンの設計、すなわちどのようなコンテストの内容にするかという点である。自分も同僚のJKUATの教員もロボコンに参加した経験はなく、同僚からはこれをコンテストでやりたいという強い意見は出てこなかった。他のロボコンを参考にしようにも、有名なものだけでも高専ロボコン、NHKロボコン、ロボカップ、かわさきロボットなど多くの種類があり、なんらかの基準をもとに検討する必要がある。ロボコンの内容の決定にあたっては、以下のような基準を考えた。
- 農業ロボットを課題にする。農業はケニアの主要産業であり、聴衆やメディアに訴えるインパクトが大きい。JKUATは農工大学であるため、大学のブランド向上にもつながるだろう(=さすがJKUAT、と思ってもらいたい)。
- 見ていて面白い、楽しめるコンテストにする。メディア受けする内容だと尚良し。
- 製品化の期待がもてるロボットが好ましい。ケニアの産業に貢献している印象を与えることができる。
学生からも自由にアイディアを出してもらおうと思い、学生を集めてブレインストーミングを実施した。学生からは収穫ロボットやスプレーロボットなどのアイディアが出たが、決定的なアイディアとはならなかった。その後農業ロボットのコンテストでネットを検索していたところ、テキサスだかどこかの大学で、綿花の模型を収穫するロボットを題材としていたのを発見し、これだと思った。これをケニアの文脈に改造すれば良いのでは考え、カメラで撮影したトマト(あるいはイチゴ)の映像から画像処理で果実の位置を特定し、ロボットアームで収穫するロボット案を思いついた。しかしこの案は見た目が地味なのでボツになった。
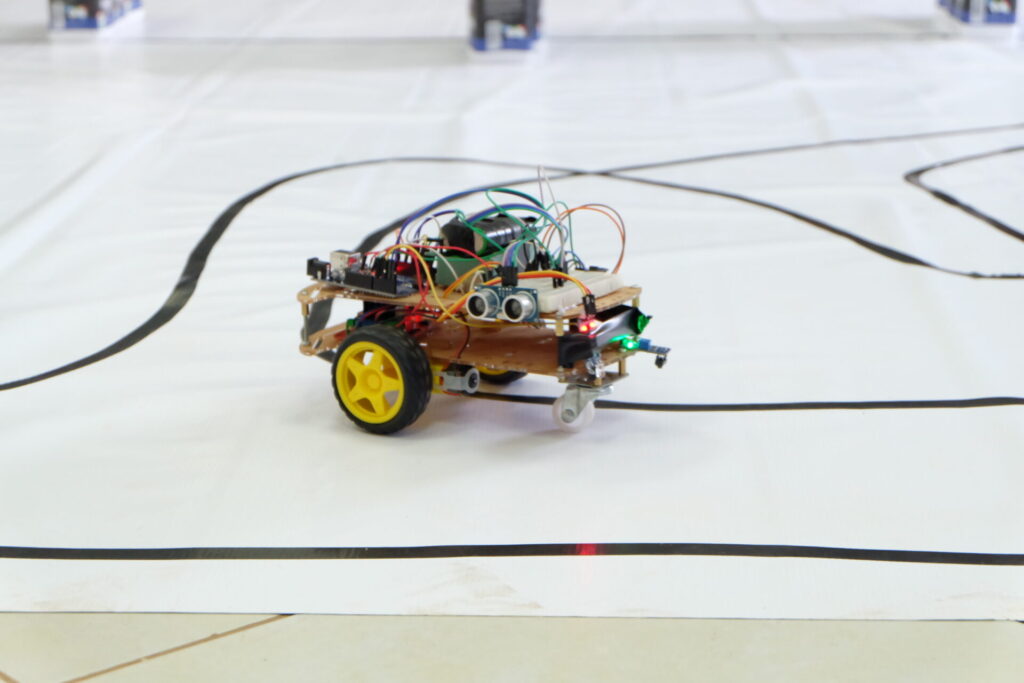
アイディアが煮詰まってきたので、ロケット開発をやっている学生たちを呼び出して相談してみた。その結果、農業という課題はおいておいて、いろいろな課題に取り組んで総合点を競う、幕の内弁当のような形式が良いという意見が出てきた。実際のところ、農業というドメインに特化して考えるのではなく、まずは技術的課題にフォーカスしてコンテストの内容を考え、その課題の意義(=何に役立つのか?)はあとづけで決めるのが良いと感じ始めており、彼らのコメントをベースに考え直すことにした。その結果、ライントレース(黒線に沿ってロボットが移動する)とピックアンドプレース(物体を色に応じて指定エリアに移動する)を組み合わせたコンテストを考案した。このアイディアは同時期に知ったETロボコンというライントレーサと課題を組み合わせたコンテストの影響も大きく受けている。
だいたいの案が決まったので、実際に実装してコンテストの難易度を確認することにした。ライントレースについてはロボットのキットを購入して自分でPID制御を実装してみた。ピックアンドプレースについては色センサで物体の色を判定し、カメラと画像処理で物体を物体を移動させる目的地を特定し、移動経路のシーケンス(たとえば前に1歩、右に90度回転、前に2歩などの行動の順番)を計算するという複雑な処理が必要である。経路生成をMatlabでシミュレーションしてArduinoに実装してみたが、機械の誤差による影響が大きく、きちんと動かすのは至難の業であることがわかった。他にもUnityを使ってシミュレーターを組んでみた(学生に使ってもらう予定だったが、結局コンテストの内容が変わったので使わなかった)。
その後も検討を重ねたところ、ピックアンドプレースは複雑すぎるという結論になり、課題から外した。ライントレースだけでは寂しいと思っていたところ、学生の強いリクエストがあり、迷路(Maze)を新たに入れることにした。迷路を課題として採用することを決めた理由は、マイクロマウスによる迷路の走破動画を見て衝撃を受けたことも大きかった。加えて、JKUATの工学部の学生団体が迷路を対象としたロボコンを直近で開催しており、相乗効果があるだろうとも感じた。
At a robotic competition @DiscoverJKUAT with @jkuat_ses . One thing for sure 50% of the projects are by mechatronics students. This tells you one thing 😂. pic.twitter.com/F9SaeGBbCa
— Rodney Osodo (@b1ackd0t) October 1, 2022
コンテスト案が確定したのは9月の終わり頃になっていた。課題が決まったら後はコースを作るのみである。
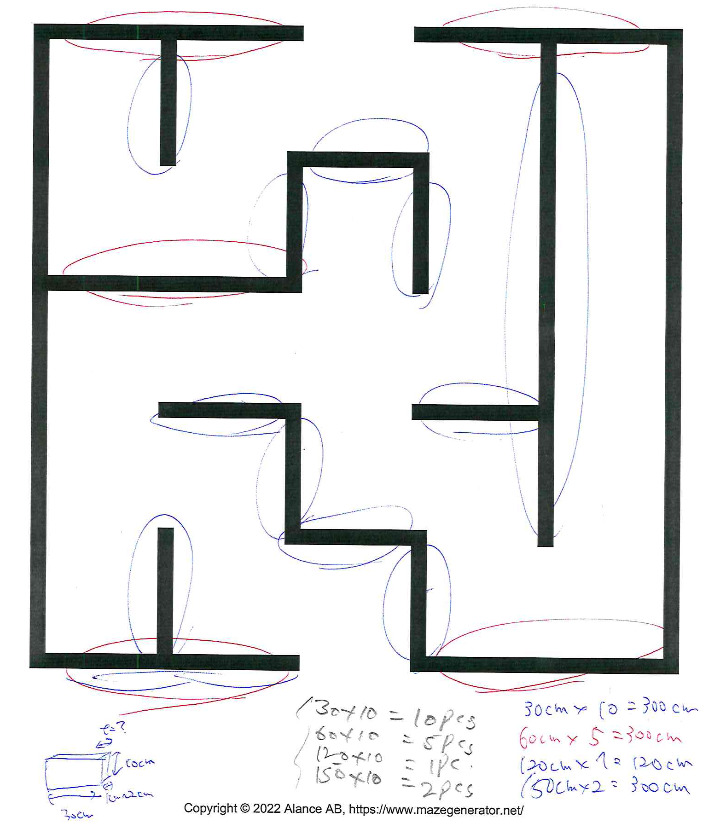
ロボコンのコース設計と製造
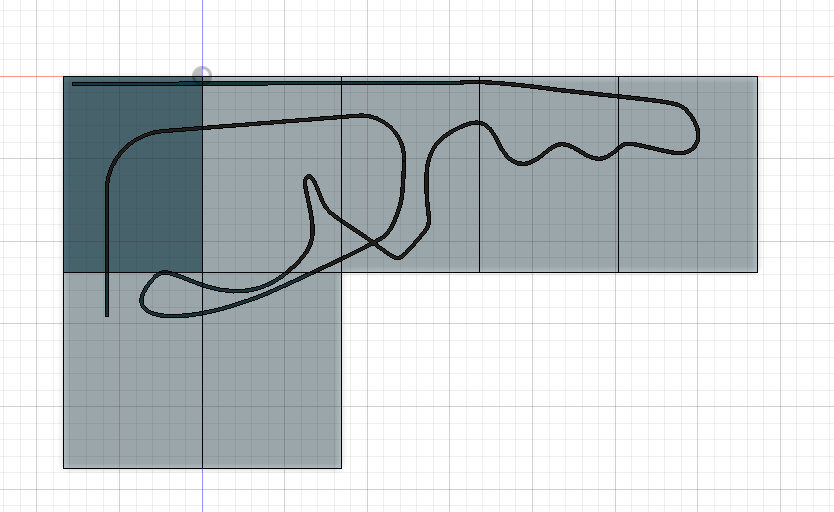
ロボコンのコースはFusion 360で設計した。
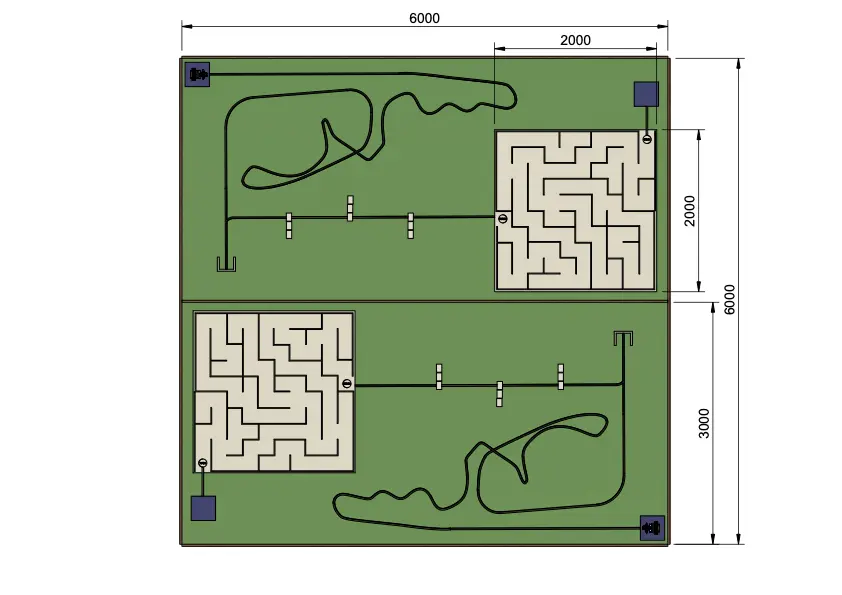
全体は次の4つのパートに分かれており、1)複雑なライントレース、2)駐車場での一旦停止、3)障害物回避、4)迷路、となっている。
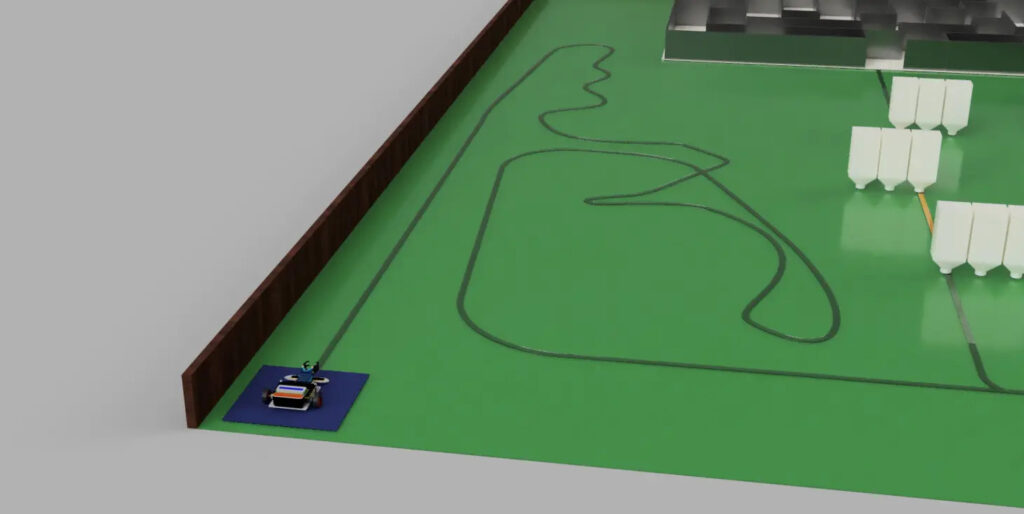

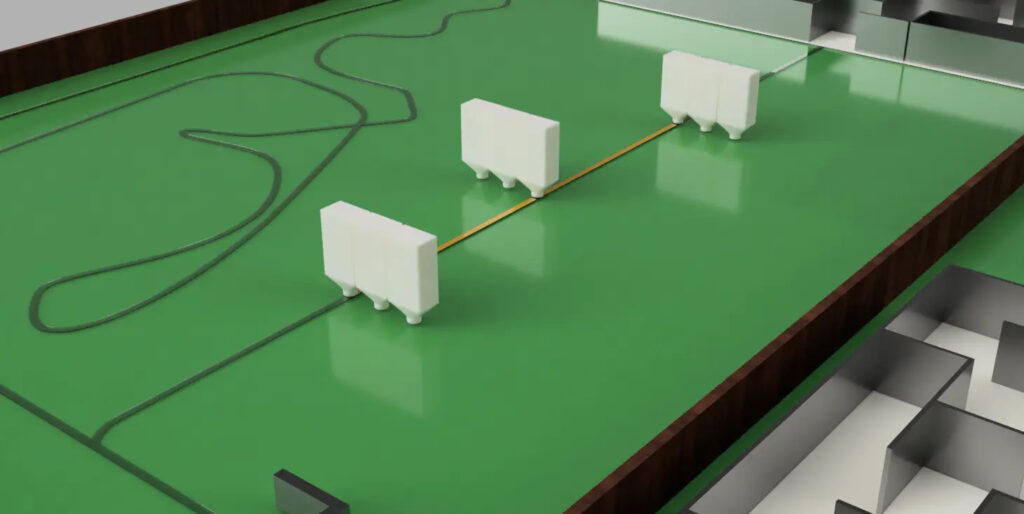

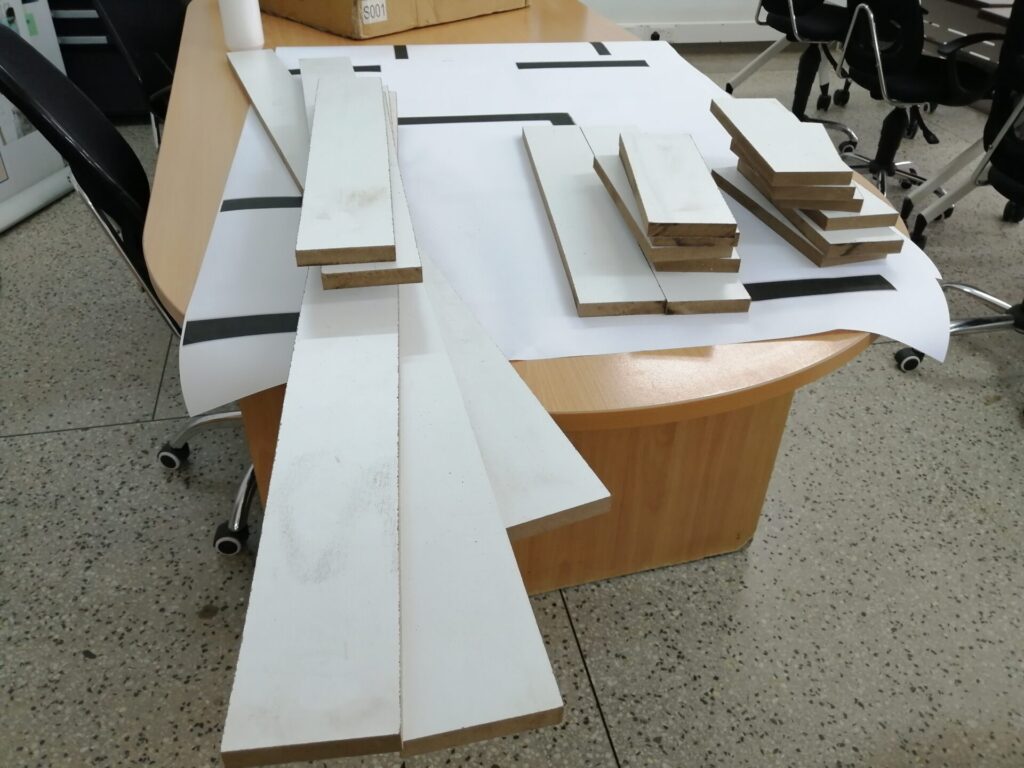
実際にコースを作るにあたっては、練習のため任意の場所に自由に設置できることが望まれるため、折りたたんで収納できることを考慮した。そのためフィールドはビニール素材のフロアマット(バナーに用いる素材)で作成し、幅19mmの標準サイズのビニールテープでライントレースの黒線を貼ることにした。迷路については木材パネルを組み合わせて作り、障害物については牛乳ボトルを集めて使うことにした。




長崎大学の先生による支援
ところで教育省によるロボコンはコロナにより開催は見送られていたが、ひょんなことからこのロボコンに長年関わっていた長崎大学の工学部の先生方と連絡を取りあうことになった。長崎大学はナイロビに海外拠点をもっており、別件でJKUATを訪問していた長崎大学医学部の先生が紹介してくれたのである。JKUATでのロボコン開催について工学部の先生方に相談したところ、支援を快諾していただいた。当初はロボコンの審査員として参加していただくことを計画していたのだが、計画の遅れもあり、審査員ではなくロボット開発に対する助言や技術指導を行っていただくことになった。結果的にみればこの変更は正解で、学生たちも大変満足していた。

今後について
実際のロボコンは11月中旬(今月)に計画されている。来年以降は学外にも広げたいと思っているが、運営体制も含めてどうするかを考える必要がある。
追記:11月のロボコンがケニアの新聞に記事として取り上げられた。
